Overview
The design of Acme attempts to provide multiple points of entry to the RL problem at differing levels of complexity. The first entry-point — and easiest way to get started — is just by running one of our baseline agents. This can be done simply by connecting an agent (or actor) instance to an environment using an environment loop. This instantiates the standard mode of interaction with an environment common in RL and illustrated by the following diagram:
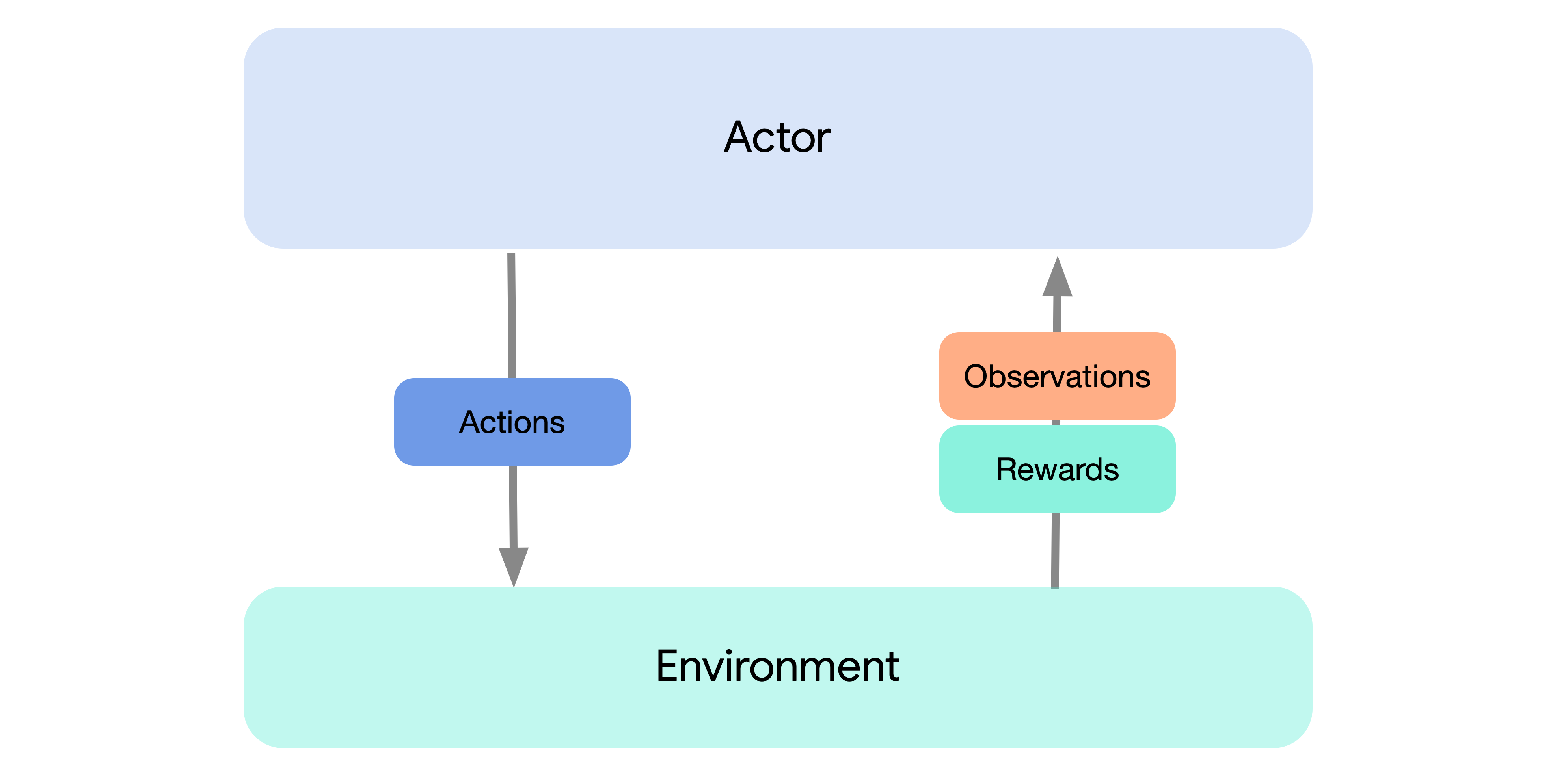
This setting should, of course, look familiar to any RL practitioner, and with this you can be up and running an Acme agent within a few lines of code. Environments used by Acme are assumed to conform to the DeepMind Environment API which provides a simple mechanism to both reset the environment to some initial state as well as to step the environment and produce observations.
Actors in Acme expose three primary methods: select_action which returns
actions to be taken, observe which records observations from the environment,
and an update method. In fact, by making use of these methods, the
EnvironmentLoop illustrated above can be roughly approximated by
while True:
# Make an initial observation.
step = environment.reset()
actor.observe_first(step.observation)
while not step.last():
# Evaluate the policy and take a step in the environment.
action = actor.select_action(step.observation)
step = environment.step(action)
# Make an observation and update the actor.
actor.observe(action, next_step=step)
actor.update()
NOTE: Currently in Acme the default method for observing data we make use of utilizes of observe/observe_last methods (reverse of the above). This is being phased out in favor of the above, which will soon be made the default.
Internally, agents built using Acme are written with modular acting and learning components. By acting we refer to the sub-components used to generate experience and by learning we are referring to the process of training the relevant action-selection models (typically neural networks). An illustration of this breakdown of an agent is given below:
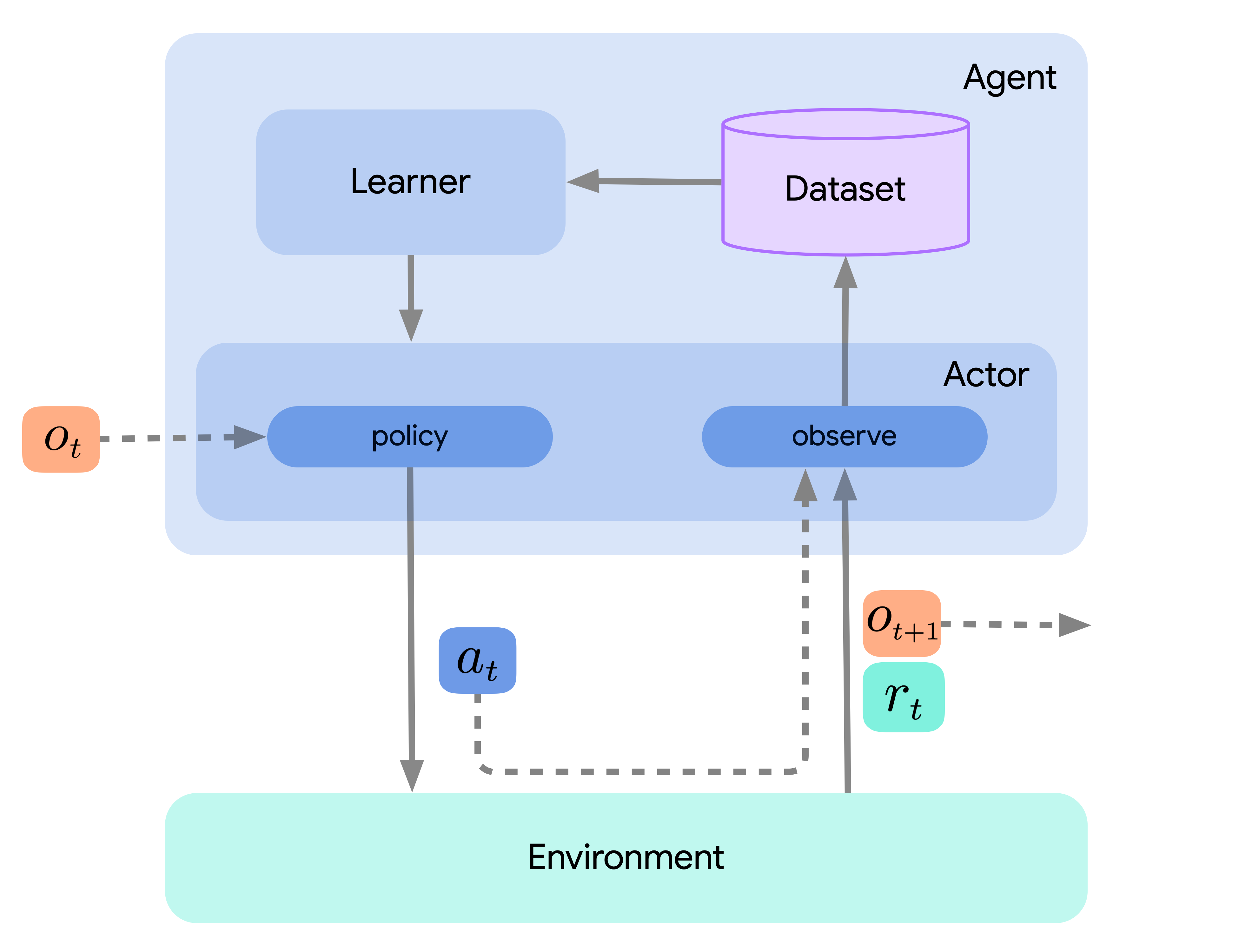
Superficially this allows us to share the same experience generating code between multiple agents. More importantly this split greatly simplifies the way in which distributed agents are constructed.
Distributed agents are built using all of the same components as their single-process counterparts, but split so that the components for acting, learning, evaluation, replay, etc. each run in their own process. An illustration of this is shown below, and here you can see that it follows the same template as above, just with many different actors/environments:
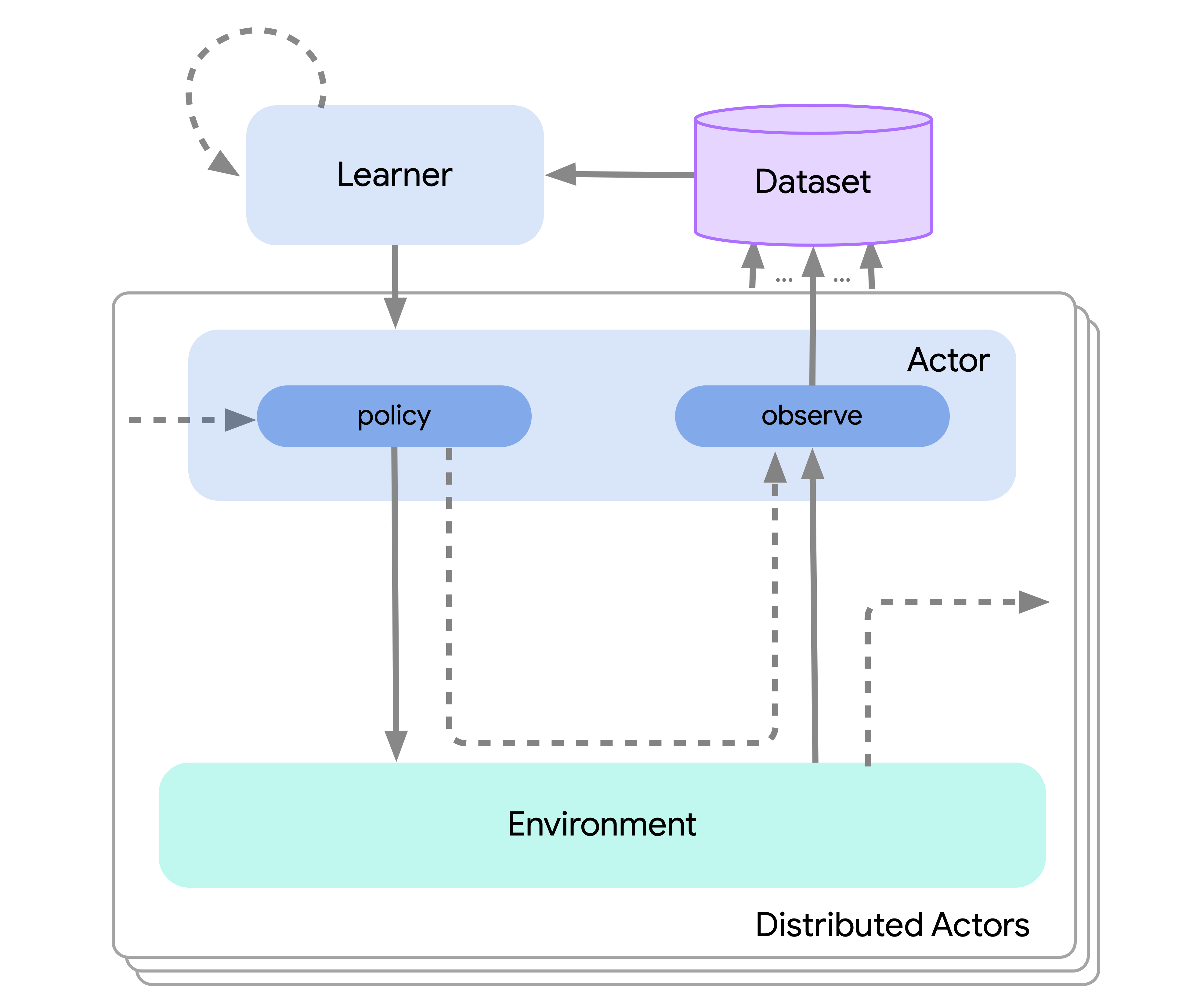
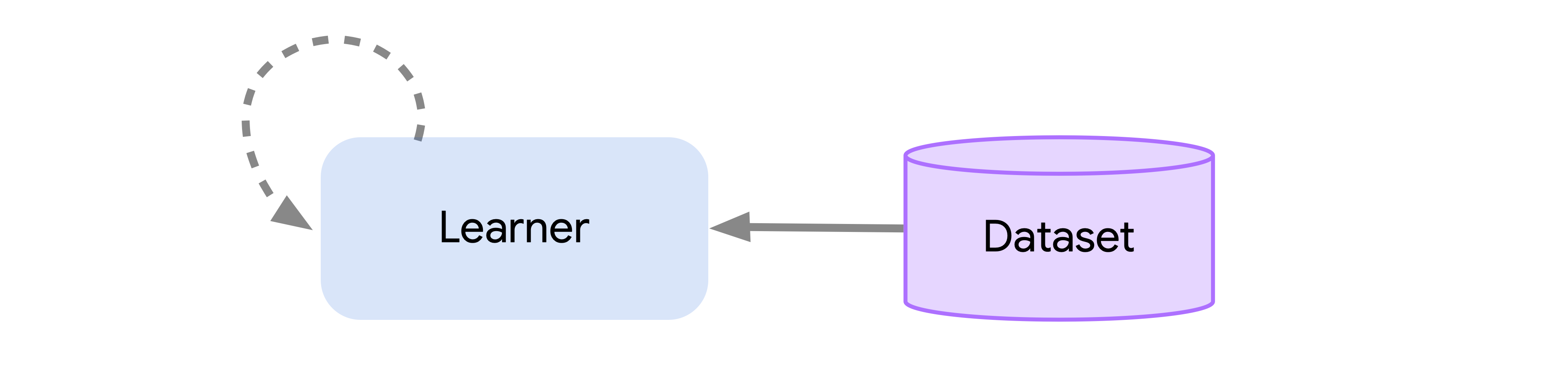
This greatly simplifies the process of designing a novel agent and testing existing agents where the differences in scale can be roughly ignored. This even allows for us to scale all the way down to the batch or offline setting wherein there is no data generation process and only a fixed dataset:
Finally, Acme also includes a number of useful utilities that help keep agent code readable, and that make the process of writing the next agent that much easier. We provide common tooling for these components ranging from checkpointing to snapshotting, various forms of logging, and other low-level computations. For more information on these components, as well as the structure described above, see our more detailed discussion of Acme components or take a look at implementations of a specific agents.